- Details
- Category: Outreach
- Published: 02 May 2018
- Hits: 1576
Robot-Palpation-Data
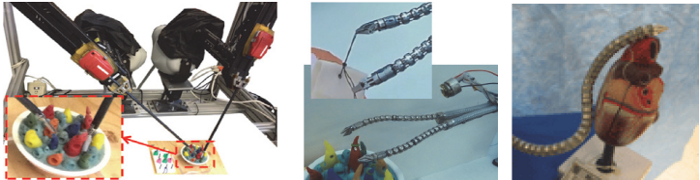
This repository shares the experimental robot palpation data from the collaborated project, "NRI: Large: Collaborative Research: Complementary Situational Awareness for Human-Robot Partnerships."
Get Started
-
Installing and activating Matlab
-
Download the code and data from here. Extract the code in a folder, say, the path is path-on-machine/robot-palpation-data/
-
Set the environment variable for your OS, NRIDATASHARE = path-on-machine/robot-palpation-data/
-
For how to create/set/change/remove a user environment variable for Windows, see this 2-min youtube video.
-
For how to create/set/change/remove a user environment variable for Ubuntu, see this 1-min youtube video.
-
NOTE that the environment variable needs to be set before running Matlab.
-
-
Run Setup_Directories_data.m
Play with the Data Sets - Try the Following Test Scripts!
Force-controlled Exploration to Obtain the Geometry Contacts
In this section, the robot is controlled to maintain a small interaction contact force in the normal direction of an unknown surface. The goal is to collect the surface geometry contacts while deforming the environment the least.
-
Run force_exploration_results.m, the displayed result was published in Journal of Mechanisms and Robotics
-
Run ***force_exploration_results('Hamlyn')***, the displayed result was presented in Hamlyn Robot Challenge 2017.
-
Run force_exploration_results('KidneyVU')
Force-controlled Continuous Palpation
In this section, the robot is controlled using a sinusoidal superimposed force in the surface normal direction while the motion in the tangent direction is specified by either telemanipulation or by pre-planned raster path.
Using the collected data - positions and forces - one could estimate the stiffness mapping in offline or online approaches. Our works have been published in ICRA 2016 continuous palpation and in RA-L 2018 continuous palpation.
Data sets collected using this control scheme are stored in Data_original\continuous_palpitation\palpation.
Probing Palpation
In this section, the robot is controlled to provide probing motion at different depths along the surface normal direction. In the probing data sets, for one probing sample, a series of positions and forces are grouped, which makes it easier to calculate the stiffness of this location.
Data sets of probing data have been used in our works in ICRA 2016 complementary model update, in ICRA 2016 to guide probing, and in RA-L 2017 utility-guided probing
Data sets collected using this control scheme are stored in Data_original\probing.
- You are here:
- Home

- Robotic Palpation Data Sharing