- Details
- Category: Outreach
- Published: 02 May 2018
- Hits: 1577
Robot-Palpation-Data
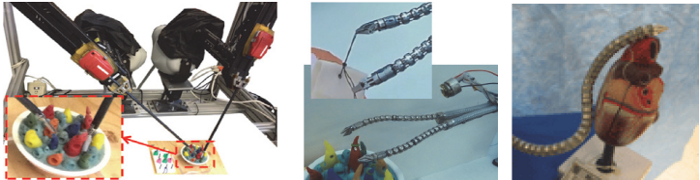
This repository shares the experimental robot palpation data from the collaborated project, "NRI: Large: Collaborative Research: Complementary Situational Awareness for Human-Robot Partnerships."
Get Started
-
Installing and activating Matlab
-
Download the code and data from here. Extract the code in a folder, say, the path is path-on-machine/robot-palpation-data/
-
Set the environment variable for your OS, NRIDATASHARE = path-on-machine/robot-palpation-data/
-
For how to create/set/change/remove a user environment variable for Windows, see this 2-min youtube video.
-
For how to create/set/change/remove a user environment variable for Ubuntu, see this 1-min youtube video.
-
NOTE that the environment variable needs to be set before running Matlab.
-
-
Run Setup_Directories_data.m
Play with the Data Sets - Try the Following Test Scripts!
Force-controlled Exploration to Obtain the Geometry Contacts
In this section, the robot is controlled to maintain a small interaction contact force in the normal direction of an unknown surface. The goal is to collect the surface geometry contacts while deforming the environment the least.
-
Run force_exploration_results.m, the displayed result was published in Journal of Mechanisms and Robotics
-
Run ***force_exploration_results('Hamlyn')***, the displayed result was presented in Hamlyn Robot Challenge 2017.
-
Run force_exploration_results('KidneyVU')
Force-controlled Continuous Palpation
In this section, the robot is controlled using a sinusoidal superimposed force in the surface normal direction while the motion in the tangent direction is specified by either telemanipulation or by pre-planned raster path.
Using the collected data - positions and forces - one could estimate the stiffness mapping in offline or online approaches. Our works have been published in ICRA 2016 continuous palpation and in RA-L 2018 continuous palpation.
Data sets collected using this control scheme are stored in Data_original\continuous_palpitation\palpation.
Probing Palpation
In this section, the robot is controlled to provide probing motion at different depths along the surface normal direction. In the probing data sets, for one probing sample, a series of positions and forces are grouped, which makes it easier to calculate the stiffness of this location.
Data sets of probing data have been used in our works in ICRA 2016 complementary model update, in ICRA 2016 to guide probing, and in RA-L 2017 utility-guided probing
Data sets collected using this control scheme are stored in Data_original\probing.
- Details
- Category: Outreach
- Published: 09 October 2017
- Hits: 3539
Abstract
The past decade has witnessed accelerated growth of medical robotics and computer-assisted medical technologies that rely on dexterous tools to enable new surgical procedures. Lately, there has been a growing trend of adopting continuum robots as a design solution for dexterous intervention. These robots present modeling and control challenges beyond the standard modeling and control paradigms for rigid-link serial robots. This half-day workshop that is targeted towards graduate students interested in pursuing research in the area of continuum robot modeling, control and applications. The workshop will cover surgical applications, kinematic and static modeling, sensing, and control of these robots.
Workshop Content
A detailed planned workshop agenda is available here .
The workshop will discuss the three types of continuum robots: wire-actuate single backbone, concentric tube, and multi-backbone continuum robots. Wire-actuated continuum robots use wires to bend a central continuum backbone. Multi backbone robots use push-pull actuation of a multitude of beams to achieve their equilibrium shapes. Concentric-tube robots use concentric combination of pre-curved elastic tubes and the robot motion is achieved by the rotation and extension of the tubes with respect to each other. After a presentation of history and motivations for recent applications of continuum robots, the workshop will focus on multi-backbone designs which have found extensive usage for dexterity enhancement in many surgical applications including otolaryngology, transurethral bladder surgery and single port access surgery.
The main focus of this workshop is to review research works on modeling, control and applications of multi-backbone continuum robots. The workshop will consist of four parts:
1. Introduction to continuum robots: history and overview of continuum robot architectures. After presenting some of the early works, we will discuss applications of continuum robots with emphasis on recent surgical applications including single port access and natural orifice surgery.
2. Modeling of continuum robot statics and kinematics: selected modeling works on all three types of continuum robots with an emphasis on multi-backbone type will be presented.
3. Sensing and interaction control: we will cover recent advances in intrinsic wrench and contact estimation/sensing using a modeling framework for continuum robots with multiple backbones. Interaction control will include stiffness modeling and active compliant motion control for continuum robots. Finally, we will present a framework for hybrid force/motion control of continuum robots.
4. Actuation compensation and friction estimation for continuum robots: we will review methods for actuation compensation and estimation of intrinsic friction parameters including our prior and current works. We will also discuss kinematic error prorogation and calibration.
Handout I - relevant papers
A combined print is available here. The followings are the paper links:
1. Simaan, Nabil. "Snake-like units using flexible backbones and actuation redundancy for enhanced miniaturization." Robotics and Automation, 2005. ICRA 2005. Proceedings of the 2005 IEEE International Conference on. IEEE, 2005.
2. Xu, Kai, and Nabil Simaan. "An investigation of the intrinsic force sensing capabilities of continuum robots." IEEE Transactions on Robotics 24.3 (2008): 576-587.
3. Simaan, Nabil, et al. "Design and integration of a telerobotic system for minimally invasive surgery of the throat." The International journal of robotics research 28.9 (2009): 1134-1153.
4. Zhang, Jian, et al. "Optimal path planning for robotic insertion of steerable electrode arrays in cochlear implant surgery." Journal of medical devices 3.1 (2009): 011001.
5. Xu, Kai, and Nabil Simaan. "Intrinsic wrench estimation and its performance index for multisegment continuum robots." IEEE Transactions on Robotics 26.3 (2010): 555-561.
6. Wei, Wei, and Nabil Simaan. "Modeling, force sensing, and control of flexible cannulas for microstent delivery." Journal of Dynamic Systems, Measurement, and Control 134.4 (2012): 041004.
7. Bajo, Andrea, and Nabil Simaan. "Kinematics-based detection and localization of contacts along multisegment continuum robots." IEEE Transactions on Robotics 28.2 (2012): 291-302.
8. Goldman, Roger E., Andrea Bajo, and Nabil Simaan. "Compliant motion control for multisegment continuum robots with actuation force sensing." IEEE Transactions on Robotics 30.4 (2014): 890-902.
9. Bajo, Andrea, and Nabil Simaan. "Hybrid motion/force control of multi-backbone continuum robots." The International journal of robotics research 35.4 (2016): 422-434.
10. Roy, Rajarshi, Long Wang, and Nabil Simaan. "Modeling and Estimation of Friction, Extension, and Coupling Effects in Multisegment Continuum Robots." IEEE/ASME Transactions on Mechatronics 22.2 (2017): 909-920.
Subcategories
Harpeth Hall High School Winterim Class
This category is used for the winterim class material at Harpeth Hall High School